4,113 Views
4,113 Viewsประเภทของหุ่นยนต์อุตสาหกรรม
หุ่นยนต์อุตสาหกรรมสามารถจำแนกได้เป็นกลุ่มต่างๆ ได้ ๖ กลุ่ม โดยเรียงลำดับตามความเหมาะสมในการทำงานดังนี้
๑. มือกลบังคับด้วยมือ (manual manupulator)
เป็นมือกลที่สามารถทำงานได้ โดยการบังคับด้วยมือของผู้ควบคุม โดยที่ผู้ควบคุมต้องทำหน้าที่บังคับทำงานอยู่ตลอดเวลา สัญญาณที่สั่งจากคันบังคับอาจส่งผ่านอุปกรณ์อย่างใดอย่างหนึ่ง หรืออาจเป็นสัญญาณวิทยุก็ได้
๒. หุ่นยนต์ทำงานตามลำดับขั้นตอนที่เปลี่ยนลำดับไม่ได้ (fixed sequence robot)
เป็นหุ่นยนต์ที่ออกแบบให้ทำงาน โดยมีเครื่องควบคุมแบบซีเควนเซอร์ (sequencer) ซึ่งมีหน้าที่สั่งงานเรียงตามลำดับ ตัวอย่างเช่น ถ้ามีซีเควนเซอร์ ๑๐ ตัว ตัวแรกสั่งทำงาน เมื่อทำงานเสร็จตามคำสั่งแล้ว ตัวที่ ๒ จะเริ่มทำงาน โดยทำงานเรียงตามลำดับไป เครื่องควบคุมแบบซีเควนเซอร์ อาจเป็นวงจรไฟฟ้าอิเล็กทรอนิกส์นิวแมทิก หรือไฮดรอลิกก็ได้ เมื่อทำงานที่เปลี่ยนลำดับขั้นการทำงานใหม่ จะต้องเปลี่ยนวงจรควบคุมใหม่
๓. หุ่นยนต์ทำงานตามลำดับขั้นตอนที่เปลี่ยนลำดับได้ (variable sequence robot)
เป็นหุ่นยนต์ที่คล้ายกับกลุ่มที่ ๒ ต่างกันที่สามารถปรับเปลี่ยนวงจรที่มีอยู่ได้โดยง่าย ทำให้สะดวกต่อการเปลี่ยนแปลงชุดคำสั่งการทำงาน มากกว่าแบบที่ ๒
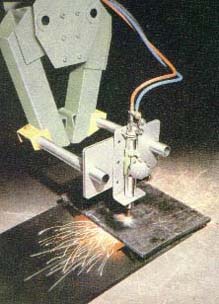
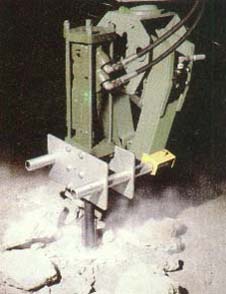
การใช้หุ่นยนต์ตัดโลหะ มือของหุ่นยนต์ถูกสร้างให้แตกต่างจากมือของหุ่นยนต์ที่ใช้ขุดพื้นถนน ทั้งนี้ เพื่อให้มือของหุ่นยนต์เหมาะกับงานแต่ละชนิด
๔. หุ่นยนต์ทำงานตามชุดคำสั่งที่บันทึกไว้ (play back robot)
ชุดคำสั่งการทำงานจะถูกบันทึกไว้ในเครื่องบันทึกความจำ ตัวอย่างเช่น ชุดคำสั่งเกี่ยวกับลำดับขั้นตอนการทำงาน และการปรับตำแหน่ง เป็นต้น ชุดคำสั่งดังกล่าวจะถูกเรียกออกมาสั่งให้หุ่นยนต์ทำงานตามที่ได้บันทึกไว้ การบันทึกความจำนั้น นิยมใช้วิธีสอนให้หุ่นยนต์ทำงาน โดยผู้สอนจับมือหุ่นยนต์ให้ทำงานตามที่ผู้สอนต้องการ สมองหุ่นยนต์จะบันทึกข้อมูลได้ เมื่อสอนเสร็จหุ่นยนต์จะทำงานเลียนแบบที่เรียนมานั้นได้

๕. หุ่นยนต์ควบคุมด้วยตัวเลข (numerical control robot)
ในหุ่นยนต์แบบนี้คำสั่งบังคับการทำงานของหุ่นยนต์มีลักษณะเป็นตัวเลข (numercial data) ชุดคำสั่งที่ใช้บังคับหุ่นยนต์อาจอยู่ในแถบหรือจานแม่เหล็ก หรืออื่นๆ

๖. หุ่นยนต์คิดเองได้ (intelligent robot)
เป็นหุ่นยนต์ที่มีประสาทรับความรู้สึก เช่น สามารถมองเห็นได้ สามารถตัดสินใจเกี่ยวกับขั้นตอนการทำงานได้ เป็นต้น
หุ่นยนต์ที่ใช้กันมากที่สุดในอุตสาหกรรมปัจจุบัน คือ หุ่นยนต์ทำงานตามลำดับขั้นตอนที่เปลี่ยนลำดับไม่ได้ ซึ่งวิศวกรจำนวนมากไม่ถือว่าเป็นหุ่นยนต์ โดยถือว่า หุ่นยนต์ที่แท้จริงคือหุ่นยนต์ที่สามารถทำงานตั้งแต่ระดับหุ่นยนต์ทำงาน ตามชุดคำสั่งที่บันทึกไว้ขึ้นไป